
- Cursan las experiencias educativas de Sistemas de Control y Dispositivos Electrónicos en la FIME
- La mayoría empleó materiales reciclados para la elaboración de los prototipos
- La presentación tuvo lugar en el Auditorio y Galería Alberto Beltrán

Estudiantes de la Facultad de Ingeniería Mecánica y Eléctrica presentaron prototipos
Claudia Peralta Vázquez
09/06/18, Xalapa, Ver.- Estudiantes de la Facultad de Ingeniería Mecánica y Eléctrica (FIME) región Xalapa, de la Universidad Veracruzana (UV), expusieron proyectos y prototipos que fueron elaborados como parte de las experiencias educativas (EE) de Sistemas de Control y Dispositivos Electrónicos.
Alejandro Sánchez Moreno, profesor de estas EE, dio a conocer que esta actividad se enlaza dentro de la vinculación que la FIME ha establecido con el Ayuntamiento de Xalapa para que profesores y alumnos fomenten la ciencia y la tecnología entre los diferentes sectores de la población, principalmente entre estudiantes de nivel primaria.
La idea es impartirles pláticas y dar a conocer los proyectos desarrollados por estudiantes de esta entidad académica en las áreas de robótica, electrónica, mecánica y mecatrónica.
Esta exposición tuvo lugar el pasado 31 de mayo, en el auditorio y Galería Alberto Beltrán, donde los alumnos de sexto semestre que cursan los programas educativos (PE) de Ingeniería Mecánica e Ingeniería Eléctrica, mostraron el diseño y funcionamiento de estos prototipos realizados a pequeña escala y elaborados –en su mayoría- a base de materiales reciclados.

Integrantes del equipo que diseñó el prototipo de un carro control remoto
Carro a control remoto
Daniela Santiago Soto, Antonio Juan Pérez, Gerardo Adrián Ruiz Villa, Juan Carlos Moreno Utrera, José Antonio Amaro Ortega, María Débora Ortega Castillo, son los creadores de este proyecto el cual decidieron elaborar por su utilidad en diferentes ámbitos sociales y de investigación.
“No siempre se puede hacer una investigación presencial y para una de tipo remoto se pueden utilizar este tipo de proyectos”, dijeron.
El carro corre hacia adelante, atrás, a los lados y tiene un sensor de proximidad en la parte frontal que le impide chocar con obstáculos.
Puede ser controlado a través de un celular que cuenta con una aplicación y de la señal de bluetooth. Además tiene dos motores, uno hace que avance y el otro le indica las direcciones.
Mencionaron que una parte de los sistemas de control son los controladores PID (Controlador Proporcional-Integral-Derivativo), empleados para corregir errores en los carros de control remoto.
El sensor de proximidad adaptado al carro es un controlador PID, con el fin de que frene instantáneamente al momento de chocar. También se le programó una función para se vuelva autónomo.
“Avanzará y al momento de chocar con algo se detendrá, retrocederá y redireccionará”.

Estudiantes de Ingeniería Mecánica explican el funcionamiento de un dron
Dron basado en tarjeta Arduino
Jhan Joshua Aburto Miranda, Miguel de Jesús Moctezuma Martínez, Marco Antonio Cano Luna, Rogelio Javier Zitácuaro Cruz, Josué Fragoso García, Jefet Emmanuel Capistrán Barradas y Fernando Ramírez Soto, son integrantes del equipo que diseñó un dron basado en una tarjeta Arduino, cuyo programa logra que los motores giren en las revoluciones que se desee mediante una aplicación instalada en el celular y la computadora.
Al momento de la demostración comentaron que para controlarlo de forma remota también emplearon una tarjeta bluetooth. El dron consta de un acelerómetro que regirá la velocidad de los motores los cuales funcionan mediante controladores PID.
Del mismo modo diseñaron una aplicación para examinar la velocidad de los motores, pero no fueron lo suficientemente poderosos para elevarlo.
“Para eso necesitábamos mucha potencia y peso; se pueden utilizar tarjetas especializadas para drones que contienen todos los componentes”.

Alumnos de la experiencia educativa de Sistemas de Control mostraron el proyecto de un dron sistema de alertas
Robot Araña
Pablo Fernando Navarro del Valle, Nathanael Vázquez Contreras, Daniel Villegas Cruz, Edgar Jiménez Rentería, Lessly Aranxa López Gutiérrez, Miguel Antonio Cuevas Ruiz y Sergio Castillo García, son alumnos de la experiencia educativa de Sistemas de Control.
El robot araña fue diseñado para identificar obstáculos que puedan presentarse en su camino y avanzar en distintas direcciones, lo que hace posible su uso de forma recreativa y estar un paso más cerca de ser un robot de rescate.
Por el óptimo equilibrio que presenta, decidieron desarrollar este prototipo mediante la impresión de piezas en 3D, dentro del Laboratorio de Ingeniería Mecatrónica Aplicada de la FIME-Xalapa.
Resaltaron que el robot araña pesa 300 gramos y su diseño servirá para desarrollar los conocimientos adquiridos en la EE de Sistemas de Control. Su aplicación principal es de uso recreativo.
Agregaron que este artefacto puede ser una gran ayuda si se le colocan los sensores correctos para el objetivo a realizar, como: cámaras y sensores infrarrojos que ayudan en desastres naturales e identificación de personas atrapadas; y para cargar equipo de primeros auxilios o un medio de comunicación con su controlador si fuera necesario.

El robot araña fue diseñado para identificar obstáculos y avanzar en distintas direcciones
Dron de Sistemas de Alertas
Jhony Montalvo Zapata, Juan Eduardo León Monge, Gonzalo Arturo Rodríguez Cortés, Edgar Adrián Flores Flores, Juan José Rivera Vázquez y Luis Manuel Portilla Arellano, explicaron que a través de un sistema de alarma vinculado al teléfono, el prototipo permitirá emitir un mensaje pre grabado y enviarlo a zonas donde sería imposible la presencia de alguien.
Otra de sus aplicaciones sería despegarlo durante un sismo con el fin de que emita la alerta sísmica. Por ejemplo, en la ciudad de Xalapa podría ser implementado al no contar con un sistema de alerta preventivo.
Los drones también son llamados cuadricópteros, porque tienen cuatro hélices y unos controladores en su programación que los ayudan a estabilizarse a las velocidades que manejan.
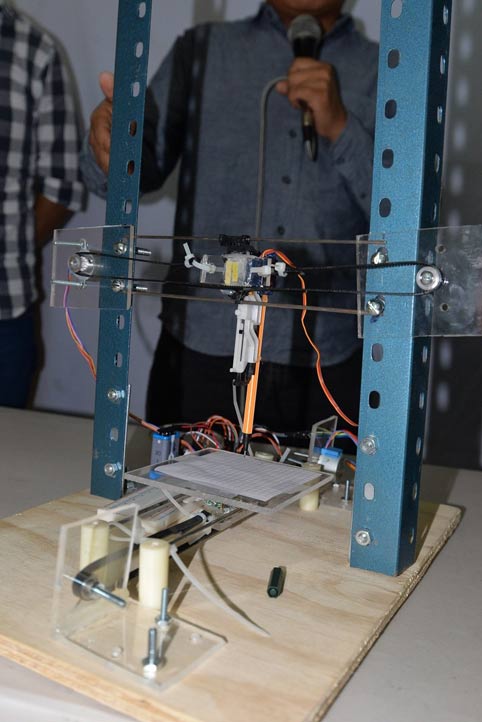
Prototipo de una máquina CNC
Brazo robótico
Este proyecto está compuesto por seis servomotores, cada uno con una potencia de 15 kilogramos de movimiento o rotación. Tiene una fuente de 12 voltios y 500 watts.
Elaborado con acrílico que habían empleado en otra EE, Fernando Vargas Carmona, Edgar Mendoza González, José Eduardo Barrientos Rosas, Gustavo Báez Gutiérrez, Aldo Santamaría Olivares y Juan Carlos Mata Piedra, también le instalaron unos resortes para darle mayor estabilidad.
Ante sus compañeros de la FIME-Xalapa dijeron que el brazo robótico se implementó dentro de la industria en 1948, y desde entonces tuvo una gran aceptación en las empresas.
El objetivo de un brazo robótico es automatizar y sustituir la mano de obra humana por una máquina que realiza a mayor velocidad y precisión los trabajos.
Agregaron que el desarrollo del proyecto es multidisciplinario y permite relacionar distintas disciplinas como la ciencia de los materiales, en el caso del material empleado en su elaboración, hasta el área de programación vista en el salón de clases y llevado en un proceso de prácticas.
Es una demostración mínima de lo que puede llegar a aplicarse, desde la industria hasta la investigación de ciertos lugares del espacio, pues este tipo de sistemas puede eliminar obstáculos cuando se le implementan diferentes sensores como proximidad, giroscopio o cámaras para que el usuario a través de la interfaz vea lo que está sucediendo dentro del sistema, apuntaron.
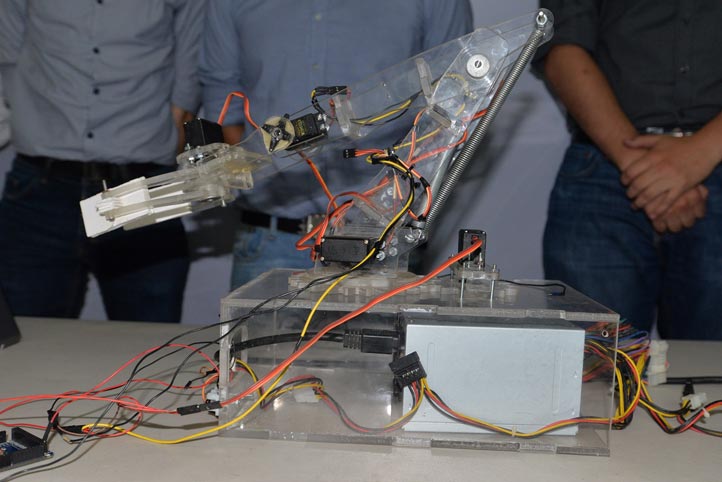
El brazo robótico automatiza las funciones de un brazo humano, de manera veloz y con mayor precisión
Máquina CNC
A diferencia de una máquina convencional, en la CNC una computadora es la que controla la posición y velocidad de los motores que accionan los ejes de la máquina.
El diseño fue hecho por José Arturo Ramírez Fernández, Víctor Aarón Landa Hernández, Raymundo Emmanuel Montes Luna, Víctor Manuel Hilario Zamora y Carlos Daniel Tejeda Mata.
La función de este aparato – elaborado con materiales reutilizados para economizar- es diseñar ciertas piezas a través de la automatización.
Rectificador de onda completa con un variador de voltaje
Yesenia Landa Cervantes, Luis Ortega Ramírez, Fernando González Portilla, Mario Edsel Lambert Cobos, cursan la EE de Dispositivos Electrónicos, de la carrera de Ingeniería Eléctrica, e hicieron la demostración de un Rectificador de onda completa con un variador de voltaje, utilizado en la conversión de una corriente alterna.
Este proyecto consta de ciertas etapas como la transformación del voltaje desde 127 volts de corriente alterna a 18 volts.
Otra es la rectificación que pasa la corriente alterna a directa por medio de un puente de diodos. Éste último es un dispositivo electrónico semiconductor que deja pasar la corriente en un sentido pero no en el otro.
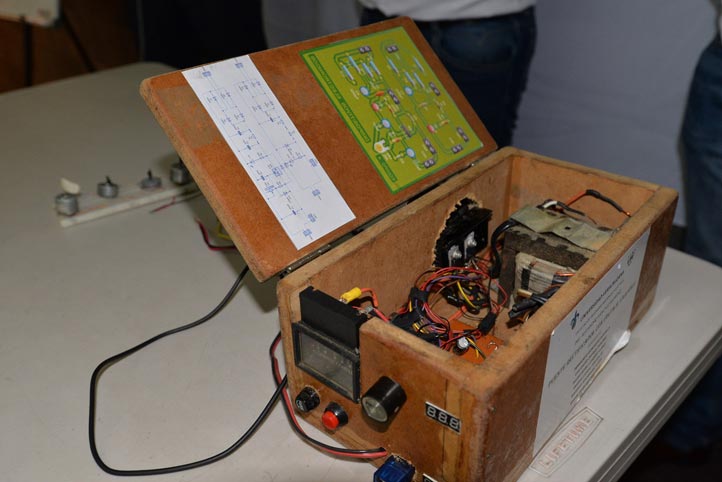
Rectificador de onda completa con un variador de voltaje
Categorías: Ciencia, Principales



